Combining Sensors Intelligently, Low Power Sensor Fusion

EM Microelectronic’s EM7180 family of products offers:
- the highest heading accuracy (2° RMS)
- the lowest power consumption (at least 10x less than a standard MCU)
- the smallest footprint
High-end smartphones, tablets, wearables, drones and other consumer market devices integrate an impressive array of sensors (i.e. gyroscopes, accelerometers, magnetic sensors, and pressure sensors) to determine a device’s orientation and motion.
Now imagine a drone in autonomous flight: the embedded application needs to process and analyze the signals delivered by all these sensors simultaneously and in real time. This task, called “sensor fusion”, is normally carried out by the device’s high performance CPU, typically an ARM Cortex processor, and requires substantial computing resources and energy.
Combining or fusing the output of various inertial sensors by using complex mathematical algorithms with Kalmann filtering at its base, sensor fusion aims to derive a single, highly accurate estimate of a device’s orientation.
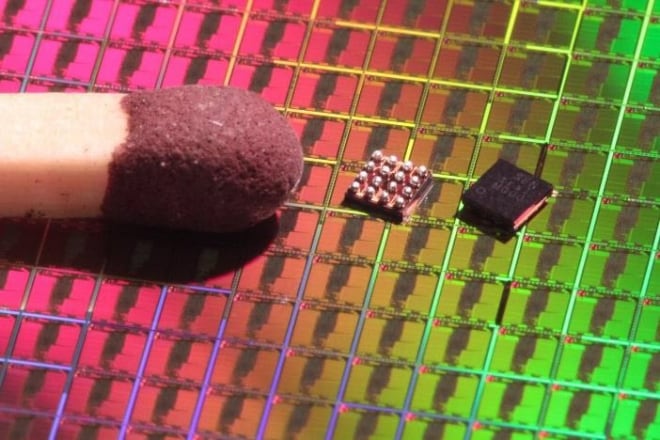
EM Microelectronic has developed – and is now producing – the EM7180-series of integrated circuits, a family of tiny high performance co-processors that perform sensor fusion operations. This motion sensor co-processor features a dedicated core with a floating point engine and dramatically outperforms an ARM Cortex M0 processor. With a footprint of only 1.6 mm x 1.6 mm, the EM7180 calculates the complex number systems used to hold motion information (quaternions) at the rate of up to 400 Hz.
The real innovation lies in the fact that the EM7180 performs sensor fusion by using less than 1% of the power of an ARM Cortex M0 handling the same sensor management and fusion tasks, while offering an even better heading accuracy.
The EM7180 manages the sensors, initializing them, managing their interruptions, and reading their data as input to the EM7180 sensor fusion engine. Quaternions or Euler angles are obtained directly from the IC. Raw and scaled sensor data, gravity, and linear acceleration (gravity removed) are also available for reading from the EM7180 by the host.
Because the EM7180 is capable of managing a pressure sensor in addition to inertial sensors, it can be configured to deliver drift-corrected altitude estimation. The drift correction for the altitude uses the accelerometer to test whether changes in detected pressure are, in fact, due to changes in height or due to wind, closing doors, or other anomalous effects. This benefits any type of flying vehicle as well as applications such as dead reckoning and robotics.
The EM7180 offers significant benefits compared to other sensor fusion devices:
today, the best-known smartphone and wearable brands integrate EM718x-series chips into their high-end devices.